What is Virtual Passive Control?
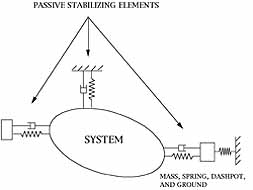
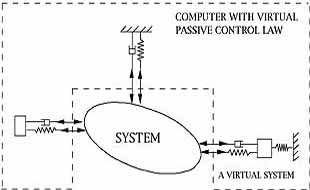
It is both theoretically interesting and practically useful to find controllers that can stabilize a given system without any knowledge of its dynamics, linear or nonlinear. These controllers are said to be model-independent. It is known that one can achieve stabilization by passive means, i.e., by physically attaching energy dissipitating elements to the system under consideration. Our work is motivated by this physical observation. We derive active control laws which mimic the behavior of these attachments. As far as the system is concerned, it "feels" like it is interacting with the world through these elements, but in fact it is the controllers that provide this interaction. There are physical springs, masses, or dampers to attach, but they only exist as controller gains. For this reason we call this controller scheme virtual passive. To accomplish this emulation, one key assumption must be made: collocation of actuators and sensors. Not only these virtual passive controllers are model-independent, their controller gains also have clear physical interpretation. This simplifies the tuning process of these controller gains greatly.
Highlights:
Depending on whether the system is linear or nonlinear, different mechanisms can be used to prove the overall system stability, and to take advantage of the model structure. Please click on the following item for additional details:
Juang, J.-N. and Phan, M., "Robust Controller Designs for Second-Order Dynamic Systems: A Virtual Passive Approach," Journal of Guidance, Control, and Dynamics, Vol. 15, No. 5, Sept.-Oct. 1992, pp. 1192-1198.
Juang, J.-N., Wu, S.-C., Phan, M., and Longman, R.W."Passive Dynamic Controllers for Non-Linear Mechanical Systems," Journal of Guidance, Control, and Dynamics, Vol. 16, No. 5, Sept.-Oct. 1993, pp. 845-851.