System Identification and Intelligent Control Laboratory
Under Construction at Cummings Hall Thayer School of Engineering Dartmouth College
OVERVIEW: This laboratory performs research in System Identification, Learning Control, Adaptive Control, Predictive Control, Disturbance Rejection, and Quantum Control. This laboratory supports the experimental components for the graduate research of:
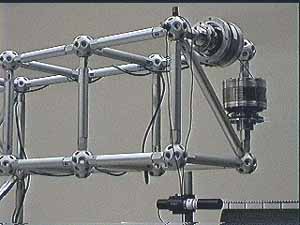
T-TRUSS: The reconfigurable 12-bay truss is constructed from aluminum tubes and node balls. At the near end of the structure is a diagonally placed proof-mass actuator which acts as a disturbance source. Two output accelerometers are placed at a nearby corner to measure the vibration of a simulated payload in two primary directions. At the far end of the structure are two proof-mass actuators for control or excitation. This is a challenging configuration because the disturbance source is strongly coupled to the output sensors but the control actuators are placed far away. Data acquisition and active control are implemented through a PC-based D-Space system. This testbed is used to support research in system identification and intelligent disturbance rejection on spacecraft in the presence of unknown disturbances.

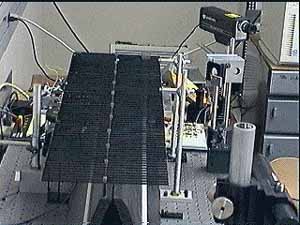
SPINE: The experimental setup consists of a series of parallel steel rods mounted on a thin center wire as shown below. The full configuration has a total of 71 rods. An actuator controls the vertical movement of the tip of an input rod either mechanically or magnetically (non-contact). A laser-based optical sensing system detects the motion of an output rod. The actuator and sensor can be placed anywhere along the system, and any of these rods can be restrained to reduce the number of degrees of freedom. SPINE is extremely flexible with complex dynamics, and lightly damped. Once perturbed, it takes more than 30 seconds for the vibrations to subside. Data acquisition and active control are implemented through a PC-based D-Space system. This setup is used to study vibration suppression controllers, and learning controllers that can learn to overcome unknown flexible dynamics in ultra-precise tracking control problems.